Altijd al een hekel aan stapelen gehad? Deze handlingrobot doet het saaie werk voor je! Bij Priema in Hoevelaken mochten wij deze prachtige robotinstallatie bouwen, na eerdere projecten die wij bij hen hebben mogen opleveren. De robot pakt metalen onderdelen van een transportband en legt deze in een krat. De operators die dit werk eerst moesten doen, kunnen zich nu bezighouden met kwaliteitscontroles, onderhoud aan de pers en de robotinstallatie en het vervangen van volle kratten voor lege kratten
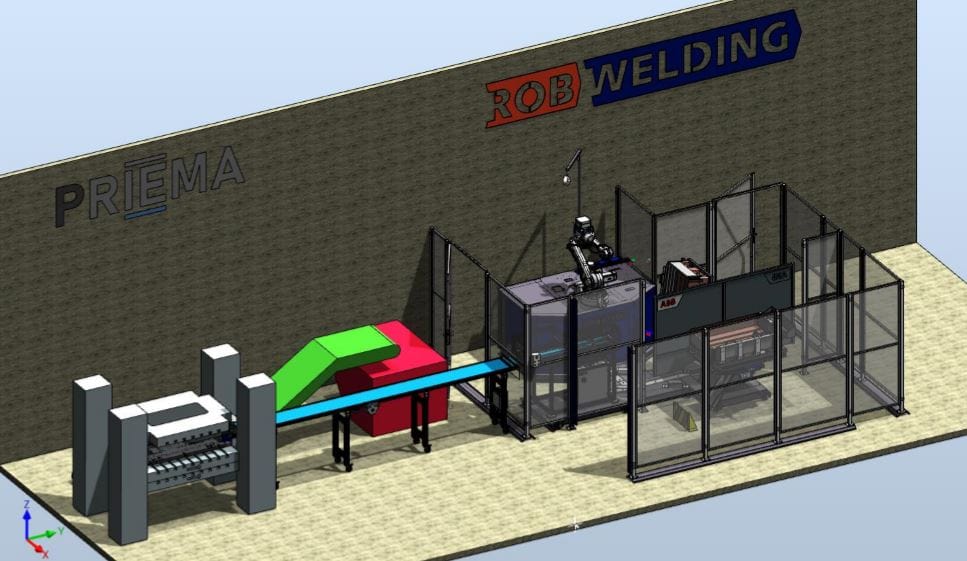
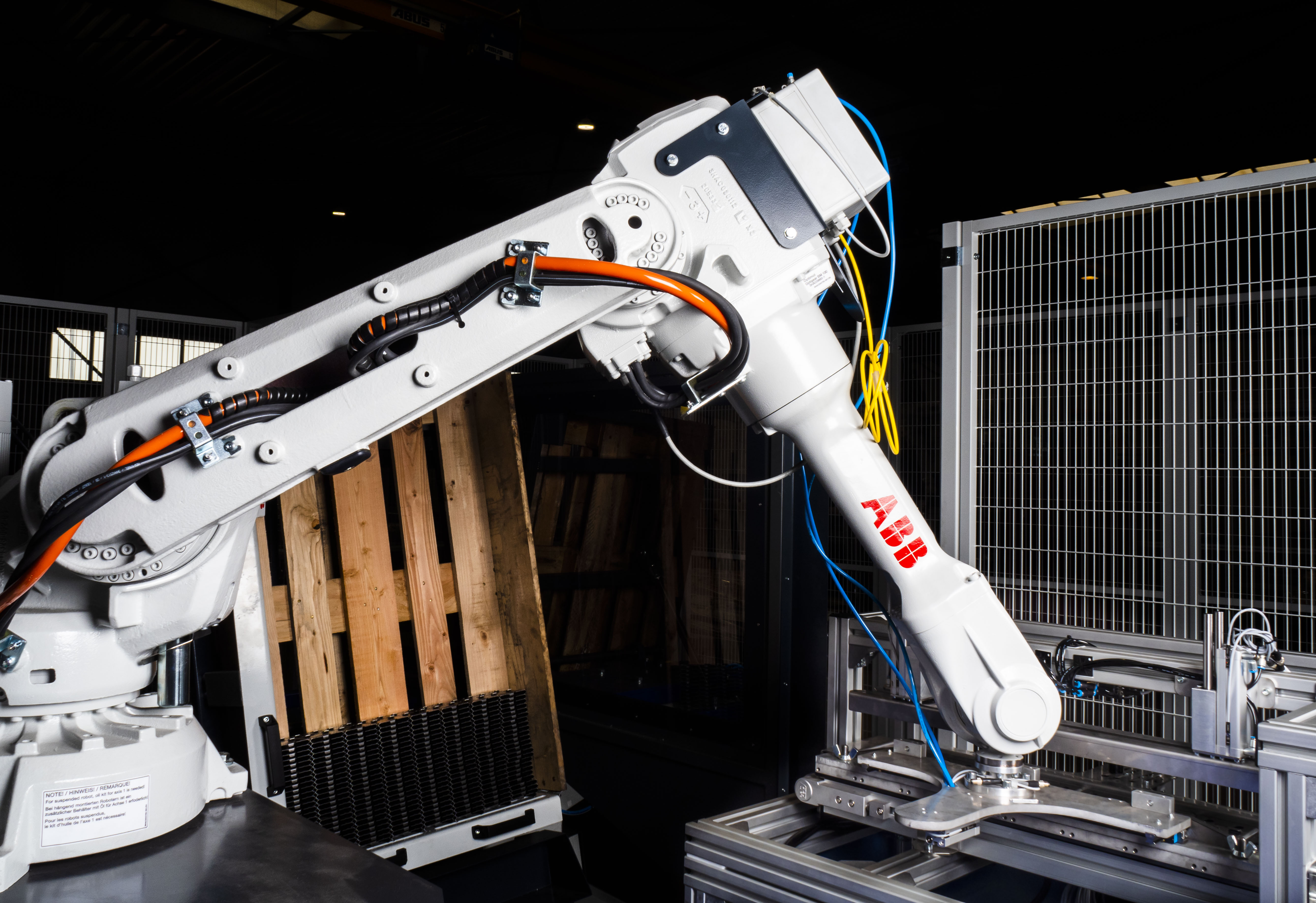
De installatie bevat een robot (ABB IRB 2600 20kg), een manipulator (ABB IRBP C500 500kg) en een centreerunit (SSEB). Aan de robot (ABB IRB 2600 20kg) is een gripper gekoppeld, deze is ontworpen en gebouwd door RobWelding. Op de manipulator (ABB IRBP C500 500kg) zijn een twee tal constructies gemonteerd, deze dienen er voor om een houten europallet de positioneren, en aan te bieden aan de robot. De centreerunit is ontworpen en gebouwd door Sseb, deze dient er voor om producten van de aanvoer transport band in de gewenste positie te positioneren en vervolgens aan te bieden aan de robot.
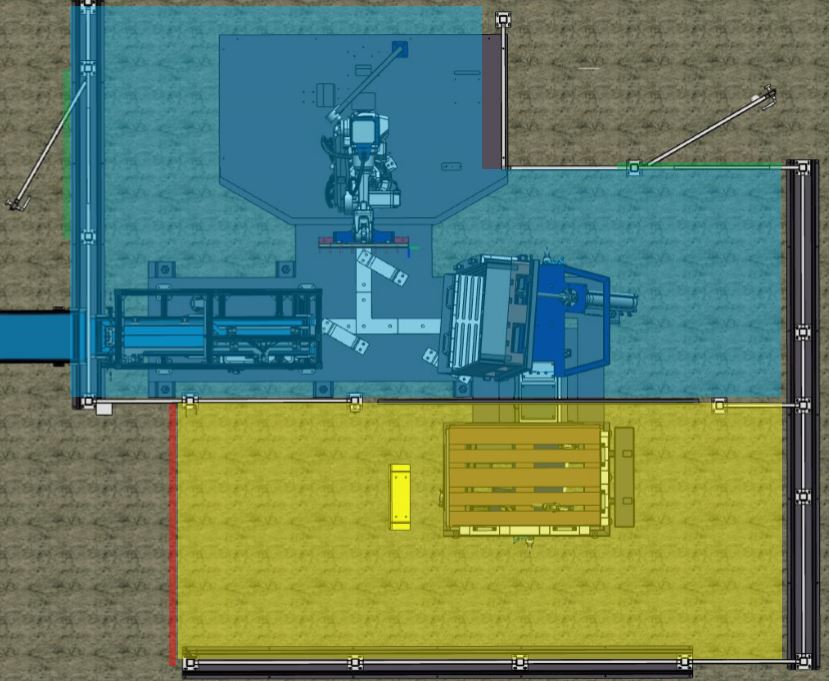
Hieronder zie je de installatie in de ontwerpfase, de operator loopt in het inleggebied van de robotinstallatie, in de tekening is dit het gele gebied. Om de veiligheid te waarborgen mag de operator alleen in dit gebied komen wanneer de robot aan het werk is. Je kunt hier de kratten voor de producten vervangen en de kwaliteitscontrole uitvoeren. Je kunt in het geel gearceerde werkgebied komen door er in te lopen via het lichtscherm (rood aangegeven op de tekening). Ook zie je het werkgebied van de robot. Dit werkgebied is blauw gearceerd, je kunt het werkgebied van de robot betreden door de deuren (op de tekening groen) te openen. Dit mag je alleen doen wanneer de robot stil staat. Wanneer de deuren gesloten zijn kan de robot op hoge snelheid productie draaien. Ook kan er bij deze robot geprogrammeerd worden in een begrensde handmatige modus.
De robot verplaatst de producten van de centreerunit naar de pallet of buffer, wanneer zowel de pallet als de buffer vol zijn is het robot programma gereed. Wanneer de operator op de start proces knop druk zal indien het lichtscherm gereset is de manipulator gaan draaien en er een nieuwe cyclus van het robot programma uitgevoerd worden. Wanneer er na het draaien van de manipulator een volle pallet en buffer in de inleg gebied is zal door de operator de buffer overgepakt worden in de pallet, vervolgend zal de constructie waarmee de pallet gepositioneerd word gekanteld worden door een handmatig luchtventiel, waarna de operator de aanslagdelen verwijderd en de pallet wisselt d.m.v. het gebruik van een heftruck, dit dient uiterst voorzichtig te gebeuren om beschadigingen aan de manipulator en of hierboven genoemde constructie te voorkomen.
Op zoek naar meer informatie? Bekijk hier ook het nieuwsbericht over deze speciaalmachine.
Laden
Robot instrueren
Aan de slag
Lossen
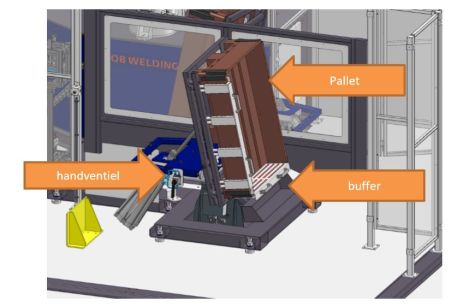
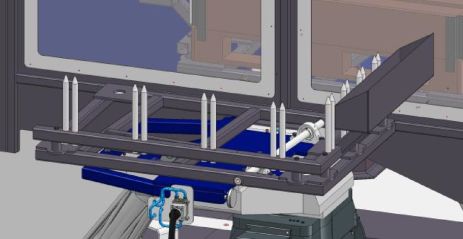
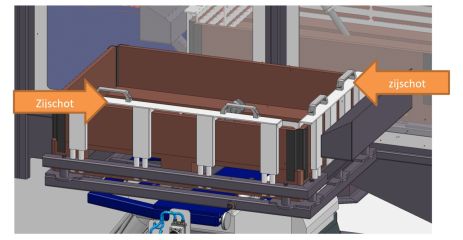
De bediener komt aanrijden met een pallet met daarop een palletrand. Deze positioneert de bediener met de heftruck op het frame Vervolgens positioneert de bediener de zijschotten en hierbij wordt de pallet in de hoek gedrukt. Vervolgens wordt het handventiel bediend zodat de pallet omhoog gekanteld komt te staan. De bediener verwijderd de palletwagen uit het station en drukt op de pre reset knop en vervolgens op de resetknop. Hierdoor gaat de robot automatisch verder als deze een pallet vol gestapeld heeft.
De bediener verwijderd de palletwagen uit het station en drukt op de pre reset knop en vervolgens op de resetknop. Hierdoor gaat de robot automatisch verder als deze een pallet vol gestapeld heeft.
Als de robot een cyclus gedraaid heeft en de pallet is vol, dan zal de manipulator gaan draaien indien het lichtscherm vrijgegeven is en alle deuren dicht zijn. De manipulator draait als de volle pallet omhoog staat. Als eerste hierna dient de bediener de buffer leeg te maken en deze in de pallet stapelen.
Om te lossen dient de bediener het handventiel open te draaien zodat de pallet zakt. Zodra de pallet helemaal naar beneden is kan de bediener de zij-schotten eruit halen en het plastic in de pallet dichtvouwen vervolgens kan de bediener met de palletwagen de pallet weghalen.

Laat onze adviseur u begeleiden
Automatisch slimmer worden is nog nooit zo makkelijk geweest!
- Karel van Vlastuin , Directeur